Robotics Systems
- ROS / ROS2
- SLAM and navigation
- Sensor integration
- Simulation-to-real workflows
I build end-to-end systems that bridge robot perception, autonomous decision-making, and backend reliability. Practical deployment, measurable behavior, clear trade-offs.
# Live engineering workflow
I specialize in autonomous robotics and backend AI systems, with hands-on experience across ROS-based perception, navigation, and production API workflows.
MSc robotics training with production experience across ROS/ROS2, computer vision, and autonomous navigation systems.
Clean interfaces between perception and business logic. Reliability controls that make systems maintainable under real-world constraints.
Vision-driven assistive systems and multi-tenant AI workflow services integrating webhooks, transactions, and state-machine routing.
Broad full-system capability with a backend-first mindset for robotics and AI products.
Recent roles and applied engineering work across robotics software and AI-enabled systems.
Professional Development
Remote
Designed and shipped portfolio-grade robotics and AI systems spanning ROS/ROS2, computer vision, backend services, and reliability-oriented architecture.
Smart Future Labs
Abu Dhabi, UAE
Built ROS-based perception and autonomous navigation modules, integrated AI decision logic, and supported simulation-to-real deployment workflows.
Lzyutes Brand
Remote
Developed AR-enabled web experiences and API-integrated front-end workflows focused on engagement and performance.
Heriot-Watt University
Dubai, UAE
Robotics middleware, AI for robotics, autonomous systems, and practical ROS deployments.
Afe Babalola University
Ado-Ekiti, Nigeria
Software engineering, systems fundamentals, and applied computing for intelligent systems.
Selected robotics, AI/ML, and backend projects with technical depth and implementation details.

Multi-tenant FastAPI backend that automates Instagram, Facebook, and WhatsApp conversations and connects them to order, invoice, and payment workflows.
Tenancy
business_id isolation
Rate limit
100 req/min per IP

Adaptive music recommendation system that learns listener preferences over time and generates explainable playlists using embeddings and contextual signals.
Modeling
taste embeddings + memory
Output
explainable playlist ranking

Autonomous retail robot for inventory tracking, customer assistance, and ERP synchronization using ROS, YOLOv5, and DeepSORT.
Detection
YOLOv5 + DeepSORT
Training
1000 epochs
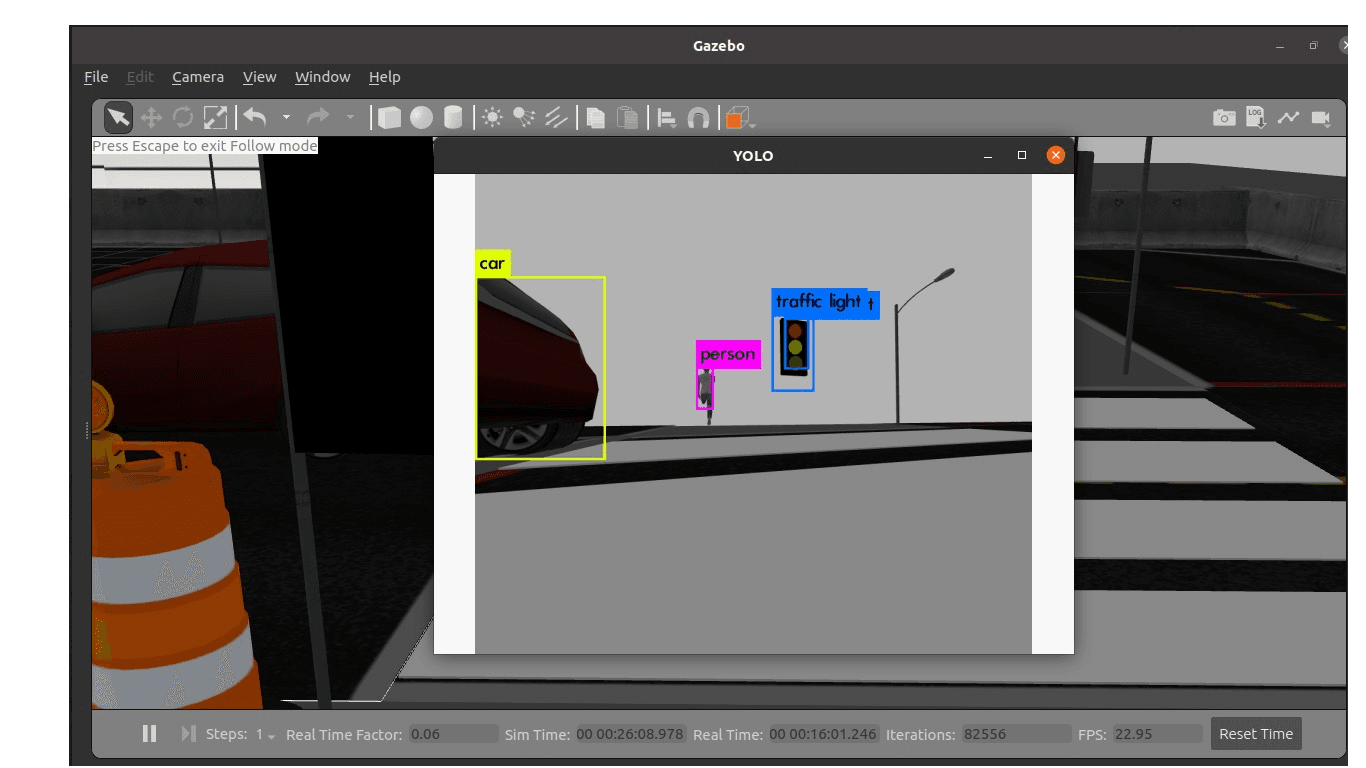
ROS-based quadruped guidance system using YOLO perception and audio feedback to support visually impaired users in navigation tasks.
Platform
Unitree Go1 + Gazebo
Perception
real-time YOLO pipeline
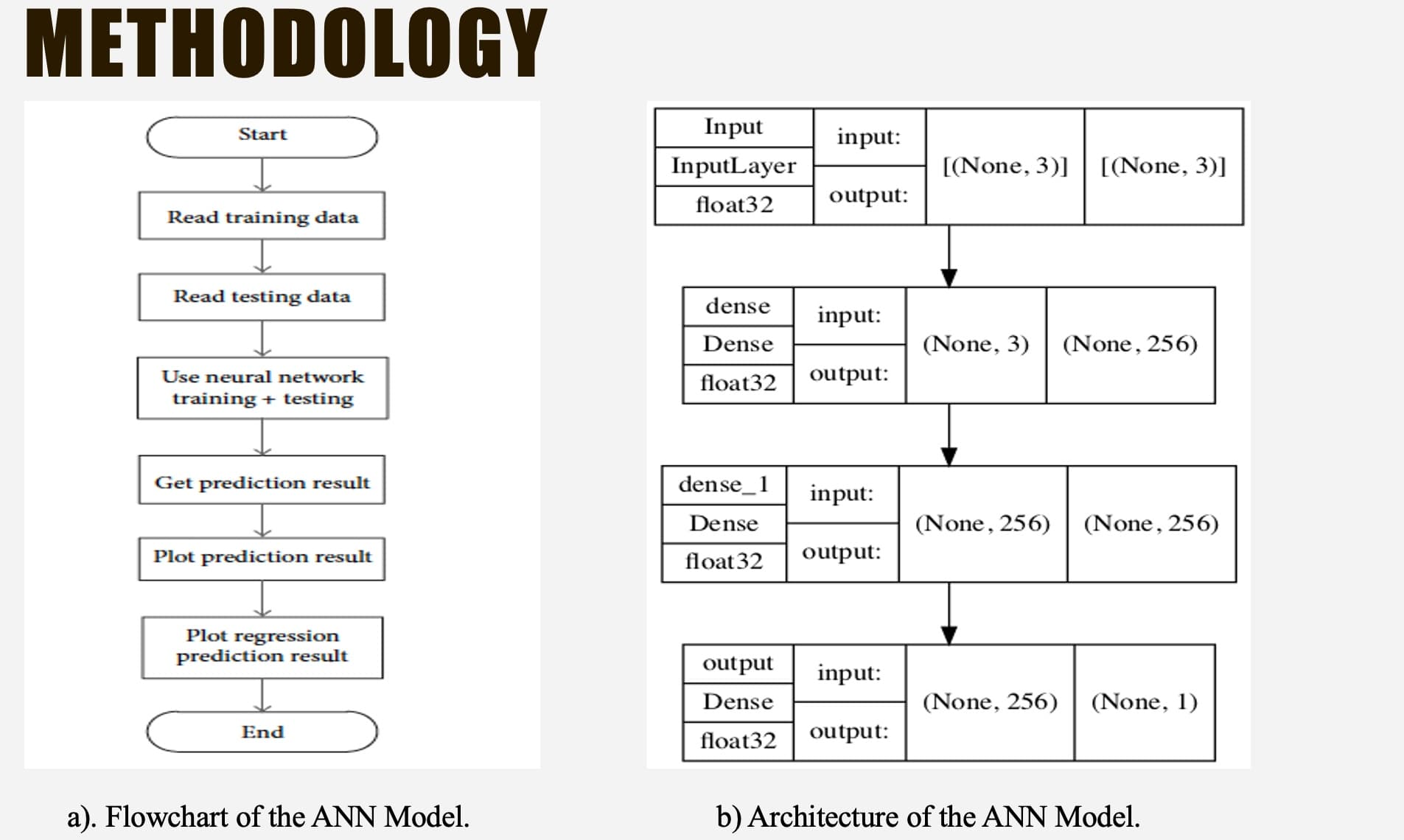
Applied AI + IoT project using neural networks to predict photovoltaic power efficiency from real-time operational telemetry.
Training
1000 epochs
Evaluation
MSE, MAE, MAPE, R²
For recruiter review, see architecture and decision-focused breakdowns in the case study section.
Browse case studiesIf you are hiring for robotics, AI, or backend engineering roles, send me details and I will respond quickly.